
★企業と人材のマッチングサービスを準備中です。アンケートのご協力をお願いいたします!↓

最終更新日:2021/02/05
背景)男性側にも問題がある不妊症
世の中のカップルの15%〜20%が不妊症に悩まされていると言われています。この問題の解決策の1つは人工授精ですが、人工授精により陽性の結果が得られる割合は30〜50%にとどまっています。
以前は不妊症は女性の問題と考えられていましたが、不妊症の症例の47%が男性側の症状であることがわかっています。そのため精子の濃度、形態、および運動性を評価して、健康的な精子を識別することが人工授精の成功率を上げるためには重要です。

AIDBの全記事が読み放題のプレミアム会員登録はこちらから↓

人工授精における精子の定性的評価という課題において、実際にどんな研究が行われているのでしょうか。
リトアニアにあるカウナス工科大学のViktorija Valiuskaiteら研究者の発表を紹介します。
研究者らは、精子が人工授精に適しているか映像から定量的に評価するディープラーニングのアルゴリズムを構築することで、この課題に取り組みました。
テーマ)映像解析による精子の運動性の定量評価
まずはViktorija Valiuskaiteらの研究におけるミッション・手法・結果をまとめました。
|
✔️ミッション ✔️解決手法 ✔️結果 |
ミッションから説明していきます。
目的)人工授精の受胎率を高めるための精子サンプリング
不妊症はホルモン剤で治療することができますが、そのような治療はごく一部の患者にしか効果がありません。しかし治療自体は3ヶ月ほど継続して行われます。
生活習慣を改善したり、薬を使ったりしても効果がない場合には、人工授精が行われます。人工授精の方法としては、体外受精(IVF)と細胞質内精子注入(ICSI)があります。
ICSIの特徴
ICSIは画像を8000倍に拡大することができる特別な顕微鏡が必要です。また、胚培養士が顕微鏡を見ながら健康な精子を1個選び注射針で採取するため、より綿密な準備が必要となります。そのため、IVFが成功しない例外的な場合にのみ使用されます。
ICSIでは、形態的に健康そうな精子を注射器で卵子の中に注入します。ICSIにより出産する女性の割合は60%と高いのですが、精子注入の際に卵子が傷つき、卵子が不妊になる可能性が2%あるため、体外受精よりも侵襲性が高いのが特徴です。
人工受精における精子のサンプリング
人工授精を行う際には、ヒアルロン結合、遠心分離、磁石、単純な装置を用いて健康な精子のサンプルを選択することができます。しかし、このサンプリング法で出産に至る女性の割合は30~35%にとどまっています。
そのため、人工授精の受胎率を高めるために、顕微鏡映像をもとに精子サンプルの適合性(すなわち運動性)をコンピュータで判定する方法が求められています。
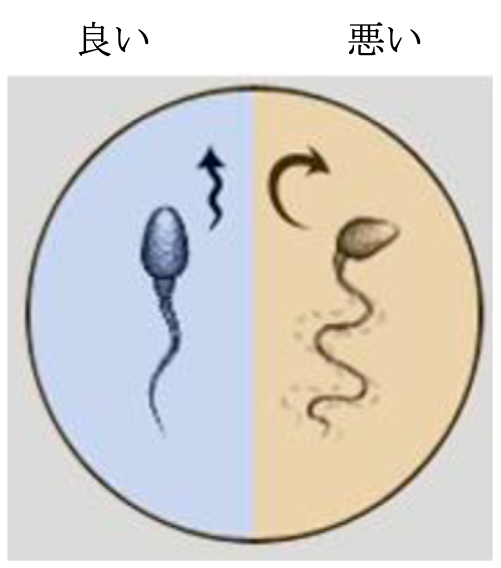
運動性が良いとは、精子の頭部が一方向に素早く動くことで特徴づけられます。運動性が悪いとは、精子の頭部がゆっくりと無秩序に動く場合に特徴付けられます。
手法)ディープラーニングを用いた物体検出
Viktorija Valiuskaiteらは、映像から精液サンプルが人工授精に適しているかどうかを判断するための新しいディープラーニングのアルゴリズムを提案しました。
データセット
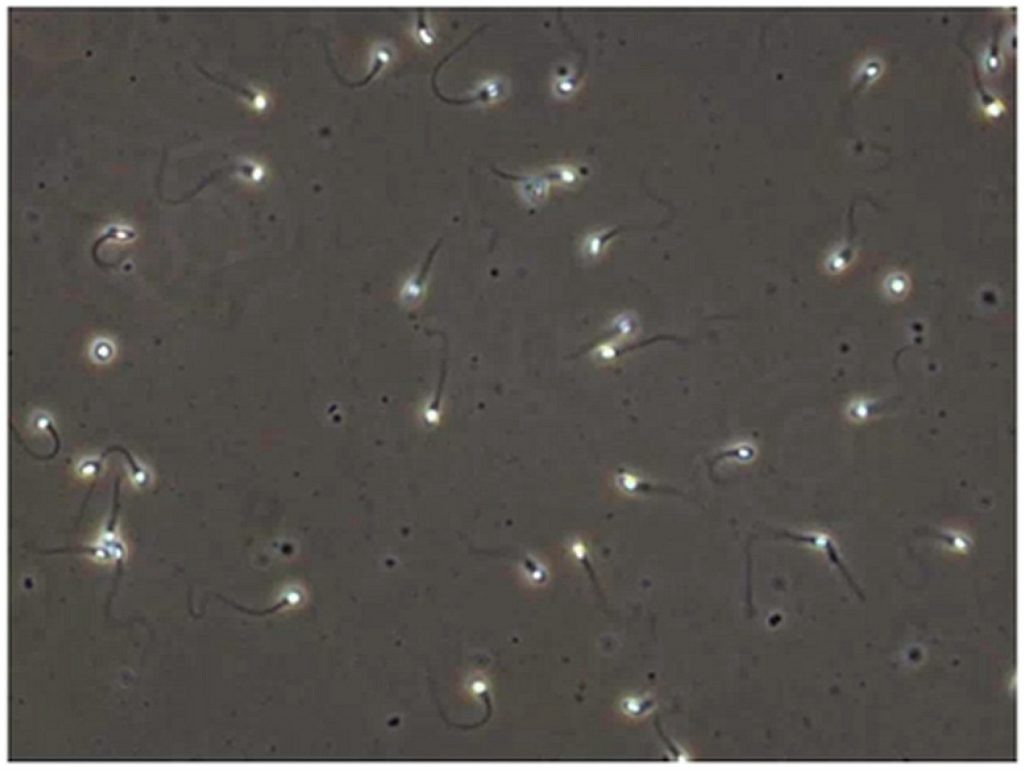
実験のために、ノルウェーの研究機関Simulaが提供するVISEMデータセットを利用しました。これは、Simulaが行った精子の運動性研究のため記録されたサンプル観察動画です。データセットは、18歳以上の85人の参加者から収集した情報が30GB以上の動画形式で保存されています。それぞれの動画の持続時間は2分〜7分でした。
画像アノテーション
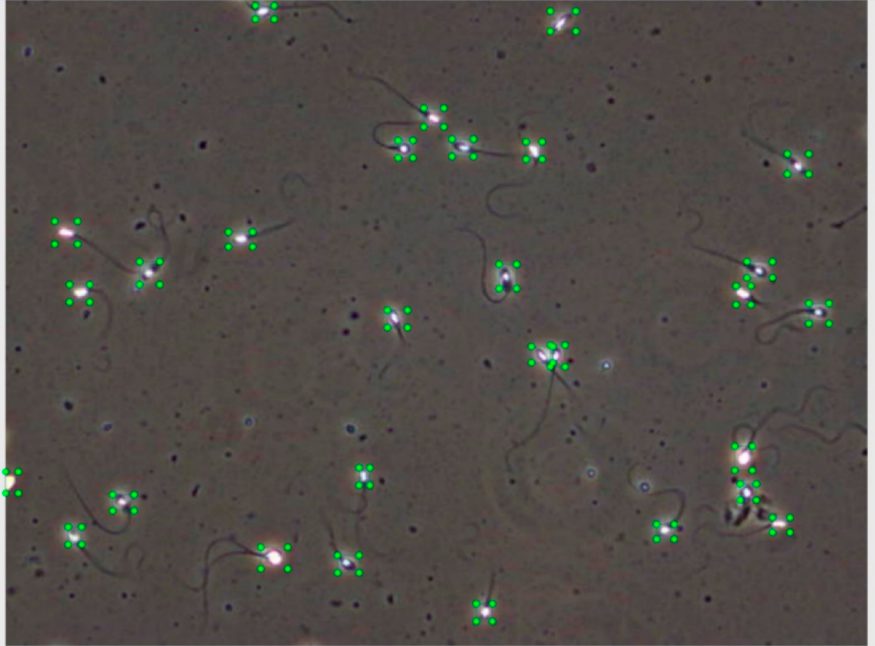
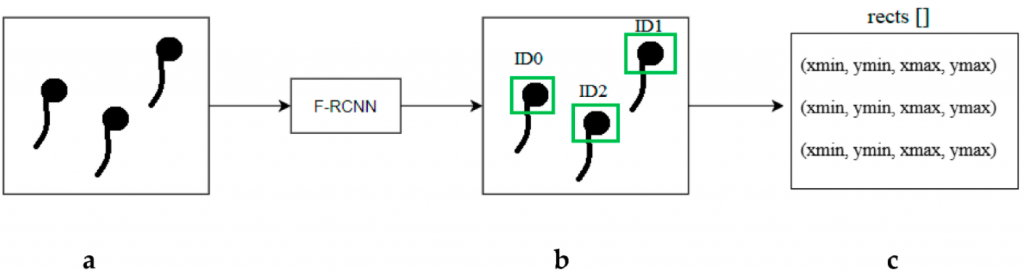
画像のタグ付け(アノテーション)は、画像アノテーションツールであるLabelImgを使用しました。LabelImgツールは、2次元の長方形で囲むことで物体をマークします。アノテーション結果の例を図3に示します。
650フレームにアノテーションを行いデータベースを作成しました。1フレームあたり平均30個の精子頭部が含まれています。
精子の頭部の運動性のみを調べたため、精子の尾はタグに含めず、頭部と首のみをマークしました。
ニューラルネットワーク
R-CNN は入力画像に対して 2 段階に分けて物体検出を行うアルゴリズムです。
第 1 段階では、オブジェクトを含んでいる可能性のある画像内の領域を特定します。第 2 段階では、特定された各領域に含まれるオブジェクトを分類します。
Viktorija Valiuskaiteらは、ラベリング画像に対してFaster R-CNNを適用しました。フレームがネットワークに入力され、事前に訓練された畳み込みニューラルネットワークがその特徴を抽出しました。抽出された特徴は、Faster R-CNNアーキテクチャの2つの異なるネットワークに送られます。
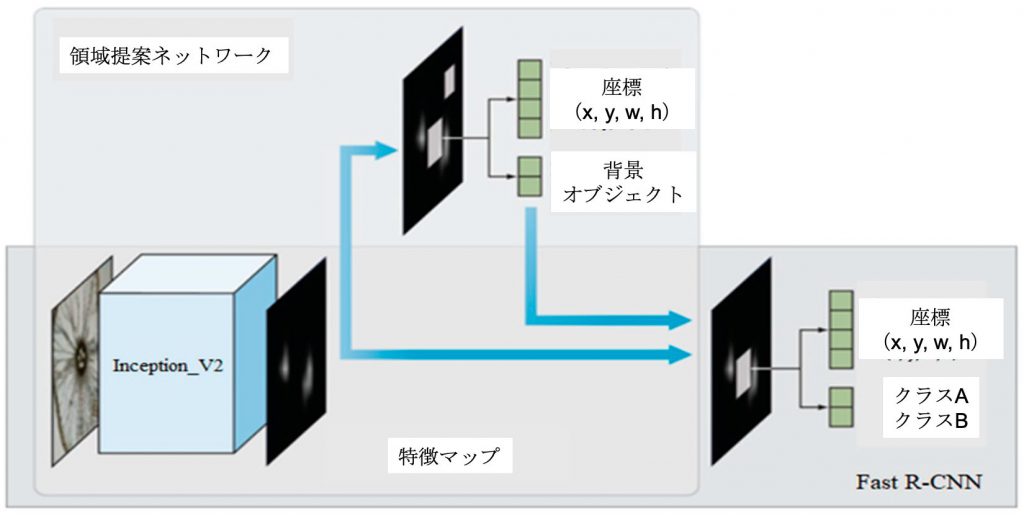
今回用いるFaster R-CNN では、CNN部分にInception_V2モデルを使用します。このモデルの利点は、小さなデータベースからでもオブジェクトを区別する学習が正確にできることです。
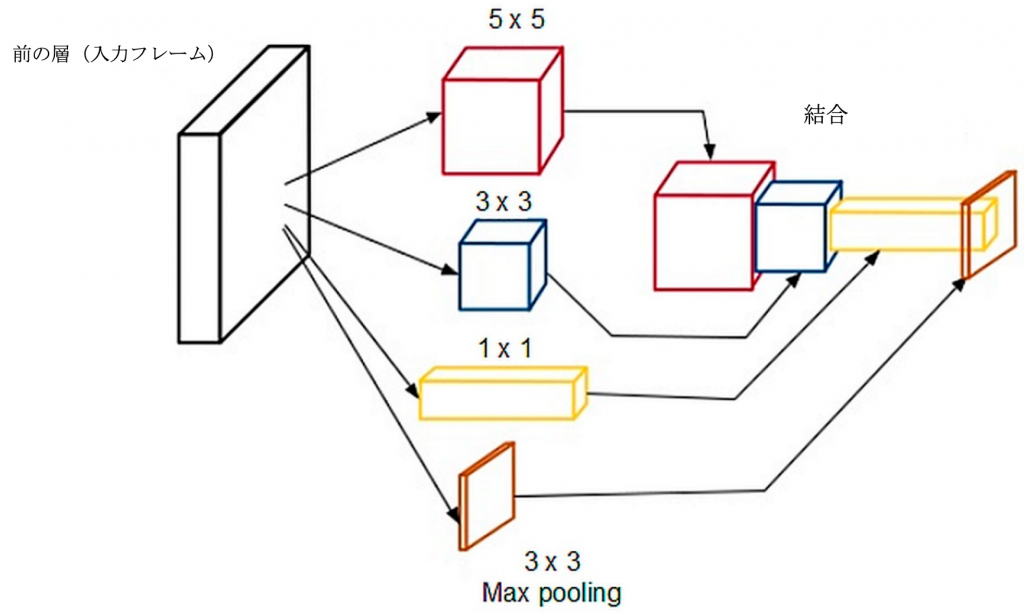
Inceptionニューラルネットワークモデルは、同じ入力フレームに対して複数の異なる変換を実行し、その結果を1つの出力に結合します。各レイヤでは、5×5、3×3、1×1の畳み込み変換(入力フレームからの特徴抽出)を行い、3×3の最大値抽出演算子(max pooling)を適用し、変換結果を1つの配列に出力します。
また、R-CNNの最終層には提案された領域の精度を測定するスコア変換器として、シグモイド関数を使用しています。
精子追跡アルゴリズム
提案されたアクティブ精子計数アルゴリズムでは、精子頭部の中心座標を追跡します。プログラムが開始されると、最初のフレームがスキャンされます。訓練済のニューラルネットがスキャンされたフレームを入力として受け取り、
①オブジェクトを囲む矩形の座標
②検出されたオブジェクトのクラス
③検出されたオブジェクトの数
を出力します。
提案手法は、検出された全てのオブジェクトの座標①を読み込みます(図6b)。あるオブジェクトに割り当てられたスコア②が閾値である0.8よりも大きい場合、バウンディングボックスの座標が格納されます(図6c)。
そして、矩形の中心座標を算出し、開始座標と終了座標の平均値を導出しました。その後、入力されたオブジェクトの座標とそれ以前に入力されたオブジェクトの座標との間の距離を、ユークリッド式を用いて計算します。
得られた距離はすべて次の条件で確認し、距離が80ピクセル以上の場合は最小距離を計算し、対応するオブジェクトのID番号に応じて適用した。
精子の生存可能性が高いと判断するには、精子が34.5μm/sで移動している必要があります。
1ピクセルのサイズは0.0002mであり、ビデオは400回の拡大顕微鏡下で撮影されたので、データベースのフレーム内の1ピクセルのサイズは0.66μmとなります。
したがって、52px/sの距離を移動した場合、生存可能性が高いと判断されます。
精子の活力は、生存可能性が高い精子の合計数と精子が移動した距離の合計との比であり、パーセンテージで表します。
生存可能性が高い精液サンプルが58%以上であれば、そのサンプルは人工授精に適していると考えられます。
結果)健康な精子の識別として統計的に有意な値が得られる
結果、統計的に有意な値が観測されました。
精子の生存可能性評価の結果
表に示すアクティブ精子計数アルゴリズムの試験結果から、10本のビデオクリップの生存可能性の推定値と実験値との平均偏差は5.3%とわかります。この結果から、アルゴリズムは実用性が高いと言えます。
実験では動画のごく一部しか探索されていなかったと考えられており、動画全体を探索することができればさらに実用性が高まると考えれらます。
アブレーション研究
ニューラルネットワークの精子認識訓練をテストするために、ネットワークの訓練の反復数を4種類実験しました。
5万回の反復では、ネットワークはフレーム内の30個の物体を検出しましたが、s各試行の中で最も低い精度でした。
10万回の反復では、アルゴリズムは33個のオブジェクトのうち32個のオブジェクトを検出し、検出されたオブジェクトの平均スコアは0.86に達した。
15万回の反復では、検出された物体の数は33個中31個に減少しましたが、検出された物体のスコアの平均値は 0.96 に上昇しました。
20万回の反復では、アルゴリズムはフレーム内の全ての物体を検出しました。
テストデータセット上の精子頭検出の平均精度は91.77%でした。
表1 ネットワーク訓練の反復数を変えて物体検出実験をした結果
| 繰り返し数 | 検出されたオブジェクト数 | 識別されたオブジェクト | 認識されなかったオブジェクト | 精度 | 平均スコア |
|---|---|---|---|---|---|
| 50,000 | 30 | 30 | 3 | 0.9 | 0.88 |
| 100,000 | 32 | 32 | 1 | 0.97 | 0.86 |
| 150,000 | 31 | 31 | 2 | 0.94 | 0.96 |
| 200,000 | 33 | 33 | 0 | 1 | 0.97 |
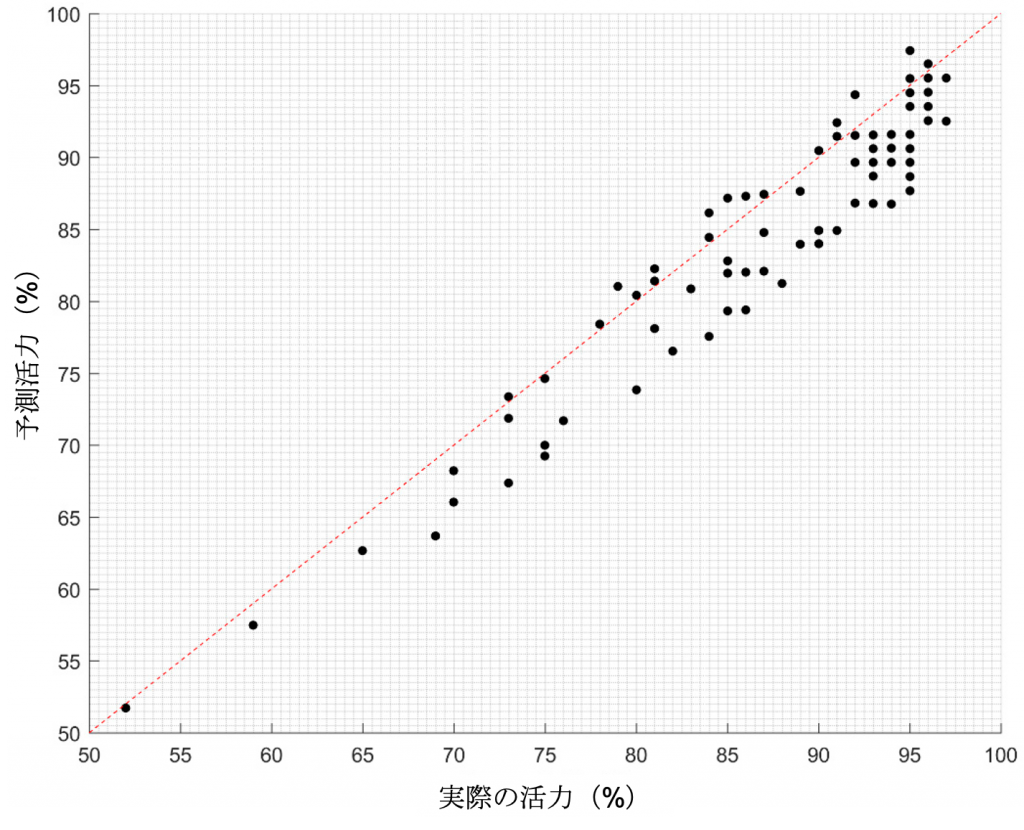
精子活力の予測結果は、実験室での分析により得られた精子活力の真の値と非常に良好な相関を示し、相関係数は0.969でした。
さらに、結果の統計的有意性をt検定で検証し、0.05未満のp値を有意としました。
運動性精子の平均速度は162.5 px/sである一方、非運動性精子の平均速度は33.35 px/sでした。、対のt検定によって示されたように、統計的に有意でした(p<0.001)。
これらの結果から、人工授精手順のニーズに合わせて、精子の運動性を効率的に評価できることが示された。また、精子頭部の検出精度は91.77%でした。
しかし、オクルージョンやのアーティファクトが発生する場合もありました。また、精子頭部がビデオフレームの境界線に接続されているため暗点のように見えてしまい、正しく認識できなかったケースもありました。これは、アルゴリズムをテストするために使用されたビデオフレームが小さすぎたことが原因と考えられます。
これらを改善し、さらに実用的な技術とすることが今後の課題になります。
研究紹介は以上です。
不妊で悩む多くのカップルを救済する技術です。
今後さらに精度が改善され、夫婦生活の大きな悩みが一つ解決できるようになることを期待したいですね。
【ほかの記事もどうぞ】

▶︎AIを使った超音波スクリーニングで胎児の心臓の異常を検出(AI×医療)【論文】
▶AIで歯科疾患を診断。熟練医師に匹敵する精度に!?(AI×医療)【論文】
▶【フレイル】専門家の経験則ではなくデータドリブンでAIが高齢者のフレイルを検出できるようになる
「AI×医療」すべてのバックナンバーはこちら
この記事で取り扱った論文:Viktorija Valiuškaitė, Vidas Raudonis, Rytis Maskeliūnas, Robertas Damaševičius, Tomas Krilavičius, “Deep Learning Based Evaluation of Spermatozoid Motility for Artificial Insemination”, Sensors2021, 21(1), 72 – DOI
■サポートのお願い
AIDBを便利だと思っていただけた方に、任意の金額でサポートしていただけますと幸いです。

























 PAGE TOP
PAGE TOP