
★AIDB会員限定Discordを開設いたしました!
ログインの上、マイページをご覧ください。
★企業と人材のマッチングサービスを準備中です。アンケートのご協力をお願いいたします!↓

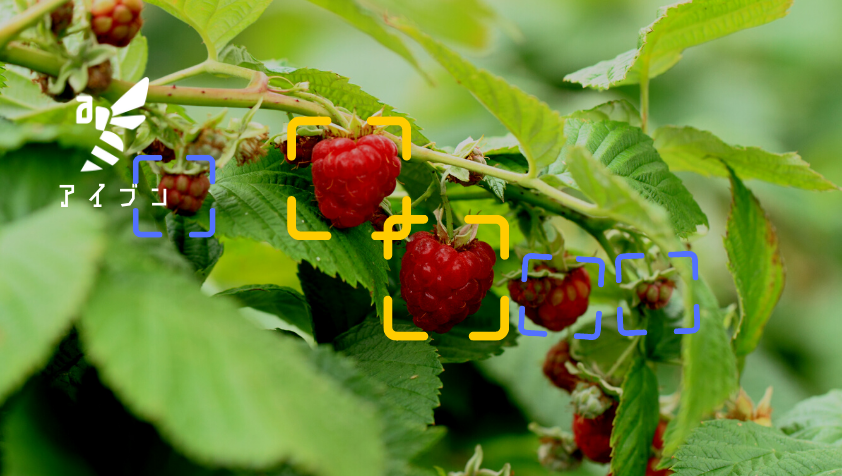
農業用ロボットの「目」は、もっと進化できる。
課題:農業で最もコストがかかるのは人件費
農業(特に園芸)業界で最もコストがかかるのは、熟練した労働者を調達することである。農業経営者は利益率が低く生活を圧迫されている一方で、増加し続ける世界人口の需要を満たすために、生産率をさらに高めることが求められている。
ロボットによる収穫は人件費を削減できることから、過去30年以上に渡って農業用ロボットへ関心が集まってきた。しかし、高精度の果実検出システムの開発は、昼夜の変化や遮蔽などの理由から困難なタスクである。これらの要因を解決するためには、明るさや視点の変化の影響が少ない頑強なモデルが必要である。
AIDBの全記事が読み放題のプレミアム会員登録はこちらから↓

明るさや視点の変化に対応できる果実検出という課題において、実際にどんな研究が行われているのだろうか。オーストラリアにあるクイーンズランド工科大学(QUT)のInkyu Saら研究者の発表を紹介したい。
彼らは、DCNN(Deep Convolutional Neural Network)をベースとして、高速な訓練とリアルタイム果実検出システムの開発を試みたのだった。
テーマ:複数の画像を使用したリアルタイム果実検出システムの開発
まずはSaらの研究におけるミッション・手法・結果をまとめた。
■サポートのお願い
AIDBを便利だと思っていただけた方に、任意の金額でサポートしていただけますと幸いです。



























 PAGE TOP
PAGE TOP